Here’s how a swarm of drones independently explores an unknown environment
6 drones of just 33 grams explore an unknown environment in complete autonomy: the results of a 4-year research project.

A group of researchers from the TU Delft, the University of Liverpool and the Radbound University of Nijmegen, with funding from the Dutch National Science Foundation in the context of the NWO Natural Artificial Intelligence program, presented the results of a research and experimentation project in the field swarm robotics, demonstrating the ability to explore environments in complete autonomy from swarms of small flying drones.
The basic idea on which this research project was developed is to make it possible, in a more or less near future, to useswarm of drone to support the rescue and recovery forces that are operating in disaster-stricken areas where there may be difficulty in operating safely.
In the researchers vision, a swarm of small drones could explore an environment, for example: the premises of a dilapidated building, identify the presence of people who need assistance and thus allow relief efforts to focus more closely on recovery operations by studying in advance the path to be taken and any obstacles and dangers to be overcome and circumvented.
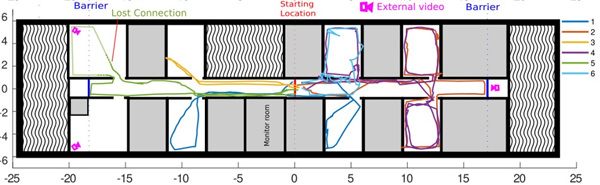
The results of the research, which employed the team in the last four years, were presented on the Science Robotics edition on October 23rd and report the results of a mission simulation that saw six drones weighing just 33 grams each in charge to explore a floor of a building and locate two puppets. The drones were equipped with micro-cameras to allow remote viewing of the explored environments. In about 6 minutes the small swarm independently explored 80% of the rooms found open.
A navigation system inspired by insects
It is precisely the activity of autonomous exploration in an unknown environment that has represented the most intriguing challenge for researchers, this because the small drones are very limited in terms of ” sensory ” capacities and above all of data processing and information gathered.
The inspiration to find a solution came from nature, in particular, from the behavior of insects, which do not elaborate a detailed map of the environment in which they move but merely remember important reference points such as food sources or the nest: ” The main idea behind the new navigation method is to reduce our expectations to the extreme: what we require of the robots is that they are only able to return to the base station.
The swarm of robots first scatters in the environment leaving each component choose a preferred direction, different from that of the other members of the swarm. After the exploration, the robots return to the wireless beacon located at the base station “.
At the beginning of the research project, the team focused on developing the basic flight capabilities of drones, such as speed control and the ability to avoid obstacles. As a second step, the focus has been on developing a method that would allow drones to avoid collisions between them.
In this case, the researchers equipped each drone with a wireless communication chip, exploiting the signal strength as a ” proximity sensor ” to allow the drones to move away from each other when the signal strength exceeds a certain threshold.
The use of a swarm of drones, in addition to allowing a more rapid exploration than a single larger drone, allows intrinsically to have redundant resources: in the experimentation, one of the drones has identified one of the two target puppets, but a malfunction of the micro camera did not allow to send images remotely. One of the other drone drones was able to capture the images and transmit them to the monitoring team.